6.1平面組合機構
6.1圖
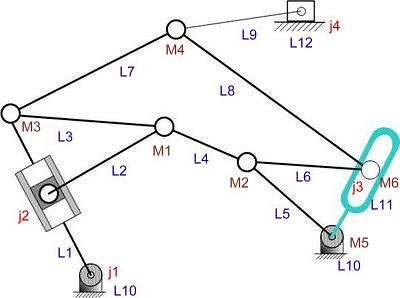
1.此圖共有12桿(L1(j2於其上不運動應視為一桿),L2,L3,L4,L5,L6,L7,L8,L9,L10,L11,L12),其中L10為固定(
接地)桿
且運動結中j1共1個運動結為旋轉結(R)DOF=1,
j2,j3,j4共3個運動結為複式結,其中j4為滑塊結(DOF=2),j2滑動結(DOF=2),j3滑槽結視為稜柱結DOF=1.
而M1,M2,M3,M4,M5,M6為多桿共結,故其所佔結數=(相連桿數-1),
故M1=(3-1)=2,M2=(3-1)=2,M3=(3-1)=2,M4=(3-1)=2,M5=(3-1)=2,M6=(3-1)=2
因此總運動結數:
J=1+1+2+6*2=16
Σf=1+1+2*2+6*2=18
2.古魯伯公式:
M=3*(N-1)-(3*J-Σf)
M=可動度
N=系統的連桿(link)總數
J=系統的運動結(joint)總數
fi=i號運動結的連結度
故利用古魯伯公式代入(N=12,J=16,f=18):
M=3*(N-1)-(3*J-Σf)=3*(12-1)-(3*16-18)=33-30=3
3.題目要求採用老師撰寫的function[df]=gruebler()
故可得知其呼叫指令為
>> gruebler(12,[14 0 2])
其結果為
ans =
3
另外一種算法為視M6非三桿共結,則可得一答案為(J=15,f=3*2)
M=3*(N-1)-(3*J-Σf)=3*(12-1)-(3*15-17)=33-28=5
其呼叫指令為
>> gruebler(12,[13 0 2])
ans =
5
4.至於j4滑塊結(外力閉合),j2滑動結(外型閉合),j3滑槽結(外型閉合)
對於本系統的可動度影響為由於前二個運動結皆屬於DOF=2之複式結(轉動,沿特定方向滑動)
而第三個滑槽結根據12日請教老師的結果,應為由於接了兩個桿而可視為一個稜柱對(DOF=1)和一個三桿相連旋轉節,共使得DOF=3故使得本系統之可動度較純使用旋轉對的系統多了數個自由度,且使其可以受和系統可動度(3)等量的外部輸入而作動,而非一可能有預載負荷的靜不定不可動結構(DOF=-1).
6.2立體組合機構
6.2圖
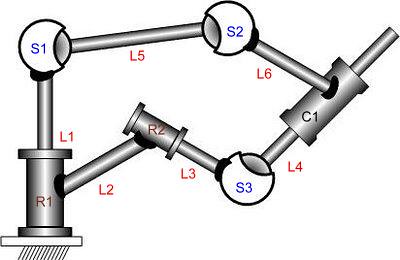
1.本系統共有6桿(L1,L2,L3,L4,L5,L6),其中L1上套有R1但仍接地為固定桿,而有6個運動結,R1,R2為旋轉結
(DOF=1),而S1,S2,S3為球結(DOF=3),C1為筒結(DOF=2)
故其Σf=2*1+3*3+1*2=13
2.若由空間古魯伯公式計算
N=6
J=6
Σf=13
M=6*(N-1)-(6*J-Σf)=6*(6-1)-(6*6-13)=7
為一可動結構,但若考慮惰性自由度則為5
3.若利用老師的function[df]=gruebler()函式
則其呼叫指令為:
>>gruebler(6,[2 0 0 3 1])
結果:
ans =
7
4.根據定義:惰性自由度(Idle Degree of Freedom)
是由於球狀結及圓筒結而使得連桿形成自轉運動(例如筒結的軸轉動)而抵銷1個自由度稱之(可由觀察而得).
因此在S1,S2間的L5會產生自轉,而S3和C1之間的L4也會產生自轉,依照定義共會少2個自由度,是為惰性自由度
,故實際機構上的可動度為7-2=5,此惰性自由度造成系統上的實際可動度較古魯伯公式所推得者為少,使得機
構之可動度較所推得者少.
6.3葛拉索機構
1.
a.根據葛拉索準則,葛拉索機構為一四連桿機構,當一機構中的最長桿與最短桿的和小於另兩桿的和,則其至少
一桿是可旋轉桿(可完全迴轉).若表示成不等式則為:s+g<p+q
b.至於非葛拉索型機構,則是最長桿與最短桿的和大於另兩桿的和,則除驅動桿外三活動連桿皆為搖桿,即為非
葛拉索型機構,表成數學式為s+g>p+q
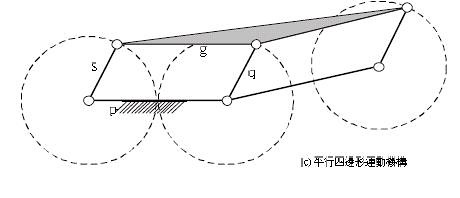
2.(圖形繪製用程式碼參考附件一)
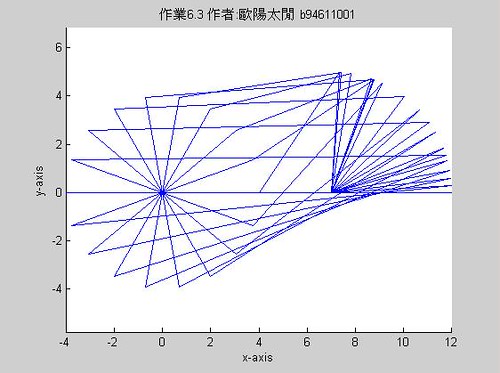
第一組:桿1-桿4分別為7,4,6,5cm
g=7,s=4,p=5,q=6
s+g=11=p+q
為中立連桿組(Neutral Linkage),葛拉索變點機構,可能有兩種運動形式(平行四邊形機構和平行四邊形反置
機構,需利用另一個平行四邊形機構方可避免)
6.3.1圖
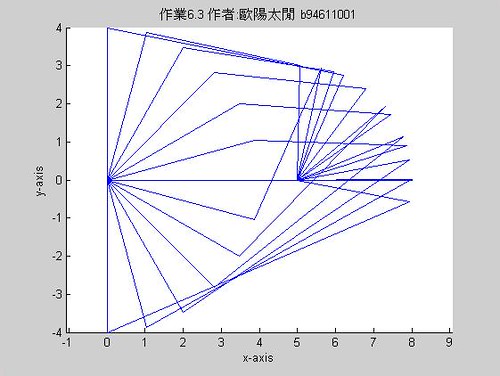
第二組:桿1-桿4分別為5,7,6,3cm
g=7,s=3,p=5,q=6
s+g=10<p+q=11
為葛拉索一型機構,第一桿為固定桿,為一Crank-Rocker Linkage機構
6.3.2圖

第三組:桿1-桿4分別為5,4,4,3cm
s+g=8=p+q,為一中立連桿組(Neutral Linkage),葛拉索變點機構,有兩種運動形式(如第一組)
6.3.2圖
3.利用grashof()函式檢驗
第一組
>> grashof(1,[7 4 6 5])
ans =
Neutral Linkage
第二組
>> grashof(1,[5 7 6 3])
ans =
Crank-Rocker Linkage
第三組
>>grashof(1,[5 4 4 3])
ans =
Neutral Linkage
以上三組皆和前述分析同,檢驗成功
4.若以以上三組要成為葛拉索機構之改善方法如下:
第一組:為中立連桿組,故可以加長桿3或桿4使s+g<p+q其成為一葛拉索機構,
或者加上另一平行四邊形運動機構,而可以避免態點的存在,如圖(摘自老師所著課本)
第二組:為一Crank-Rocker的葛拉索機構.
第三組:為中立連桿組,故可以加長桿2或桿3使s+g<p+q其成為一葛拉索機構,
或者加上另一平行四邊形運動機構.
心得:本次作業在使用古魯伯公式時體會,在工程的分析上不能一切照公式硬帶,須臨機應變,例如多桿共結或者是複式結的處理皆須另外考慮,而在處理葛拉索機構時,方知簡單的四連桿機構分析起來竟然如此複雜,而且在解位置需要大量的計算,但最後能推得各種組合的運動模式,由此可見前人的智慧.
附件1:link4(l)程式碼
function link4(l)
%作業6.3.2 顯示用程式碼 作者 歐陽太閒
%本程式為便利繪出三種四連桿之機構,故參考老師所著之程式範例4.7-function four_link2
(theta2,r,mode)
%並嘗試進行簡化改寫,以利使用.
clf; %清除畫面
axis equal; %軸等比例
title('作業6.3 作者:歐陽太閒 b94611001'); %資訊
xlabel('x-axis');
ylabel('y-axis');
d2r=pi/180; %角徑轉換因子
ang=(0:15:360)'*d2r; %形成一組軌跡所需角
l2=l.^2; %開始建立常用之多項式,根據老師所著課本之解四連桿位置及參考程式範例4.7
Bx=l(2)*cos(ang);%解B結之x位置
By=l(2)*sin(ang);%解B結之y位置
m=(l2(4)-l2(3)-l2(1)+l2(2))./(Bx-l(1))/2;m2=(m-l(1)).^2;
p=(By./(Bx-l(1)));p2=p.^2;
Cy=((m-l(1)).*p+sqrt(m2.*p2-(p2+1).*(m2-l2(4))))./(p2+1); %解Cy之位置
Cx=m-(By./(Bx-l(1))).*Cy; %解Cx之位置
Cx=l(1)+sqrt(l2(4)-Cy.^2); %解Cx之位置
for i=1:length(ang)
if isreal(Cy(i)) %去除虛數解
line([0 Bx(i) Cx(i) l(1) 0]',[0 By(i) Cy(i) 0 0]'); %實際繪製
end
end
%程式結束
2 則留言:
做得很好。當然要完全解出四連桿仍然要考慮到許多細節,而且這些細節常常必須在撰寫程式時均必須考慮。如果僅看課本或看其他書籍,也無法如自己下海寫出一個程式那麼深刻。而且在此過程中,所獲會更多。
感謝老師的指教
的確實際操作才能了解機構的實際運作模式,和許多未曾考慮的條件.
張貼留言